智造赋能
数创未来




动态正文
「未来机器人」发布室内外平衡重无人叉车
2021-06-23
研发背景
五年来,未来机器人团队基于近100个项目应用案例以及逾500个方案规划经验,深刻认知到,工业无人车辆大规模应用爆发的前提是解锁外月台货车装卸、高位货架货物存取、板货堆叠、料笼堆叠等大规模刚需“深水区场景”。而“深水区场景”会伴随着复杂多变环境(人机混场、货物乱放、货物不标准、货车类型多样等)。
对客户而言,判定工业无人车辆是否真正可用(对人工叉车的完全替代)的唯一标准是其在复杂多变环境下的峰值工作效率是否与人工叉车可比拟。即在确保安全和稳定性的前提下,“无人”的感知(信息获取)和运动控制(动作执行)能力要与“人工”无限接近。
技术实现
2018年底,未来机器人启动了VNP20系列产品的专项研发,10位博士,历经近3年时间,用自主研发的3D激光+视觉感知技术、多轴实时运动规划技术以及高精度视觉伺服控制技术,赋予了VNP20极强的感知和运动控制能力。3.0m/s的最大运行速度、多轴联动能力、货叉末端精准操作的连贯程度,使其在复杂多变环境下的峰值工作效率与人工叉车可比拟。

3D激光+视觉感知、视觉伺服控制——为安全和效率把关
车头方向:采用3D激光+视觉的感知方案,感知距离和视野得到大幅提升,确保100%安全的情况下,VNP20具备目前无人叉车最大行驶速度3.0m/s。同时,通过对障碍物目标的深度学习和分类,可实时判断并进行自主绕障。
货叉方向:使用3D激光+视觉对叉取目标及取放空间的观测数据,对无人叉车Max 6自由度(6 DOF)进行实时动作优化并将结果输入到视觉伺服控制器中,实现多轴组合流畅运动,确保装卸、取放、堆叠等货叉末端操作精准、高效执行。


标配多种属具,以标准化车体解决行业非标问题
VNP20系列产品标配侧移器、调距叉、多托盘搬运器、旋转器、纸卷夹、卷管器等多种属具,并为每类属具配置了标准的控制模块,满足托盘、料笼、软包、纸卷、周转箱等不同行业不同形态物料的运输。

更强的地面适应能力,应对外月台、室外工况
VNP20装载了450mm的高耐磨实心橡胶轮,实现13%最大坡度、50mm最大过沟宽度以及30mm最大过阶高度的越障能力,轻松应对外月台、室外等高速、高负载作业工况。

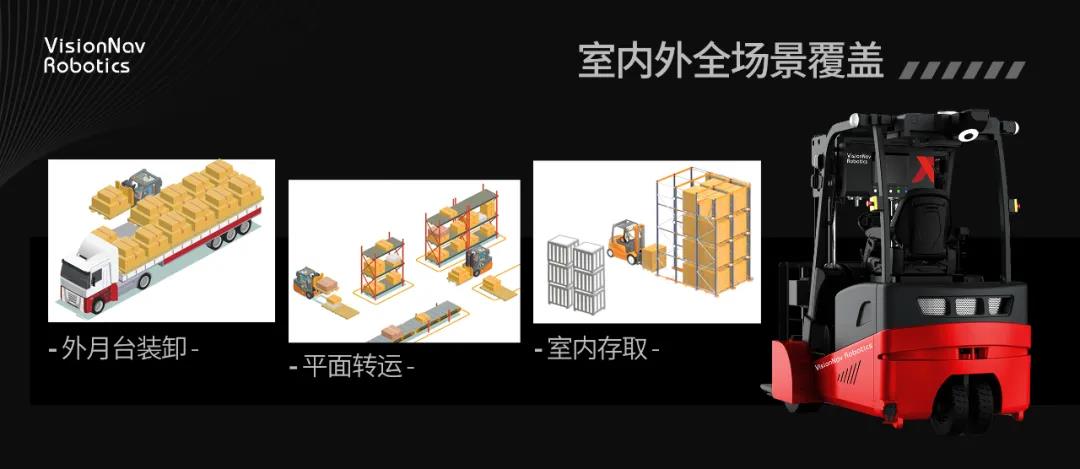
以外月台货车装卸为核心
实现全场景覆盖
历时3年,未来机器人重磅推出的VNP20产品的设计关键点有哪些?
未来机器人产品总监杨建辉表示,团队在开发VNP20系列产品过程中,重点关注产品在复杂多变环境的工作能力,包括应对光照变化的室外定位能力、三维环境感知能力、准确高效的视觉伺服控制能力,以及车体本身的防水防尘能力。“外月台货车装卸作业占节点物流内人工叉车作业量的50%以上,是VNP20设计的主要应用场景。由于场景的复杂度高,不仅货车种类多样、停车位置随机,装卸的物料也形态各异,这就要求我们的产品具备非常强的感知能力。同时,外月台货车装卸是无人叉车全场景中对峰值工作效率要求最高的点,如何通过动作优化和视觉伺服控制实现高效运动是另一个关键点。”
综上所述,VNP20系列产品基于乘用车无人驾驶框架下的高性能软硬件配置,突破以外月台货车装卸为核心的工业无人车辆大规模刚需场景中存在的技术难题,为实现工业无人车辆全场景规模化应用打下坚实基础。
返回列表